Introduction
Today, we are going to teach a computer how to see depth in a standard, 2D photograph.
Whether you are analysing the structure of a forest canopy from an RGB drone image or helping a robot navigate a room, understanding the physical distance of objects without expensive 3D sensors is one of the biggest challenges in computer vision.
Let's look at how Monocular Depth Estimation (MDE) solves this — and then apply it to a real forestry use case.
Get the complete DepthAnythingV2.ipynb and follow along at your own pace.
After downloading the notebook, choose your preferred environment:
- Make sure Python is installed. If not, get it from python.org.
- Install Jupyter:
pip install notebook - Navigate to your folder:
cd path/to/your/folder - Launch:
jupyter notebookand open DepthAnythingV2.ipynb. - Run cells with Shift + Enter.
 Google Colab
Google Colab- Go to colab.research.google.com.
- Click File → Upload notebook and select DepthAnythingV2.ipynb.
- Run cells with Shift + Enter or Runtime → Run all.
- Install VS Code and the Jupyter extension.
- Open the folder and click DepthAnythingV2.ipynb in the explorer.
- Select a Python kernel and run cells with Shift + Enter.
Tip: The notebook's first cell handles all pip install commands automatically.
Enter Depth Anything V2
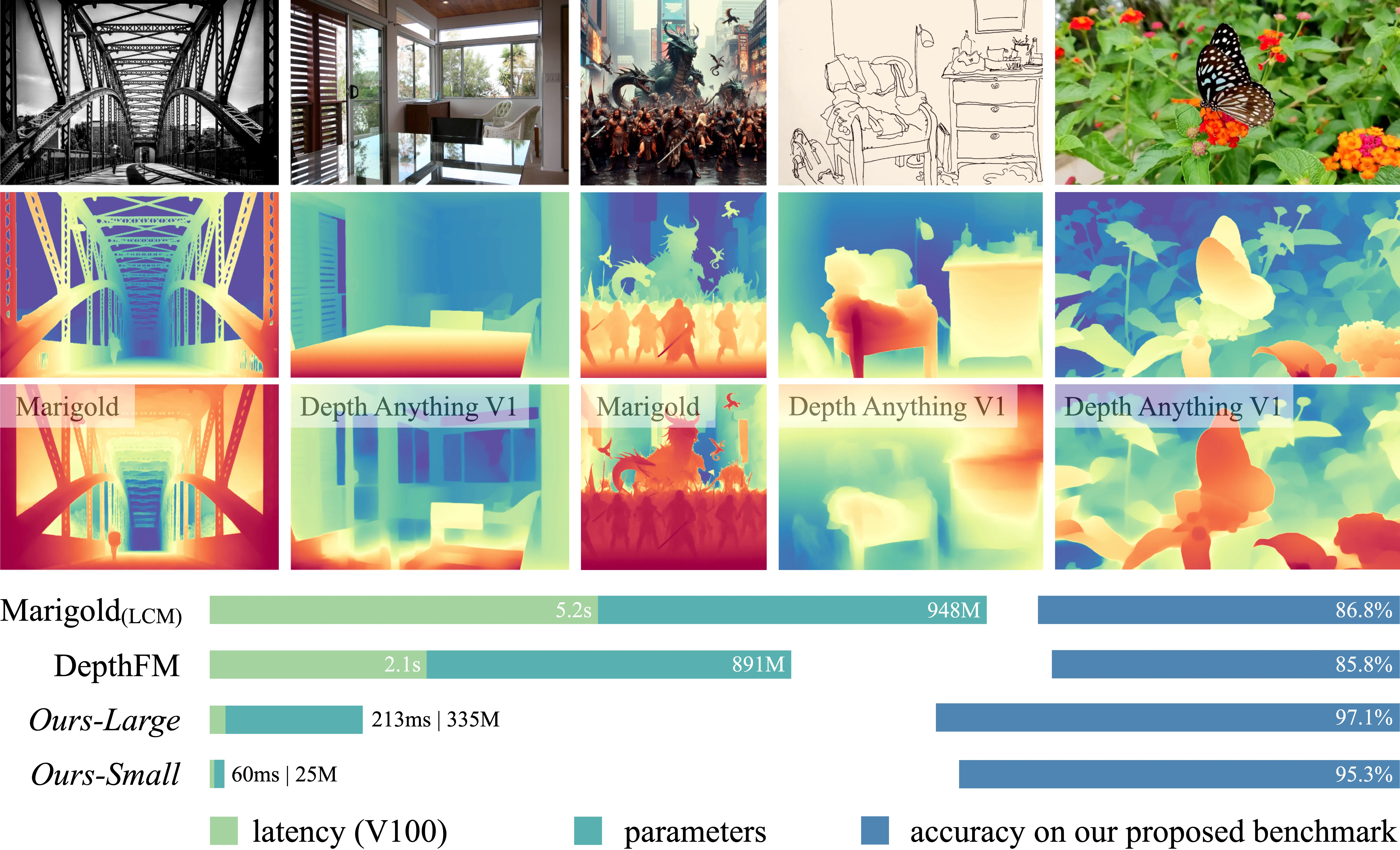
Released in 2024, Depth Anything V2 is a “foundation model” built specifically to estimate depth flawlessly across any environment.
How is it so accurate? The Teacher-Student Method:
- The Teacher: Researchers trained a massive AI on 595,000 perfectly accurate synthetic (computer-generated) 3D images.
- The Massive Dataset: This Teacher AI then labelled over 62 million real-world, unlabelled images.
- The Student: Those 62 million images were used to train the efficient “Student” models we use today.
The result? Unmatched detail — capturing incredibly fine features like thin branches and sharp edges — running 10× faster than previous models.
Setting Up
We start by mounting Google Drive and installing the required libraries.
# Mount Google Drive (Google Colab only)
from google.colab import drive
drive.mount('/content/drive')# Install required libraries
!pip install transformers huggingface_hub pillow matplotlib rasterio
from PIL import Image
import matplotlib.pyplot as plt
from transformers import pipeline
print("Libraries loaded successfully!")print("Downloading and loading the Depth Anything V2 model...")
# Hugging Face pipeline abstracts away the complex architecture.
# The 'Small' version is fast enough for standard hardware.
pipe = pipeline(task="depth-estimation", model="depth-anything/Depth-Anything-V2-Small-hf")
print("Model loaded and ready!")The Stress Test
We use an RGB aerial image of a forest. This is a fantastic stress test: the model must figure out the structural complexity of overlapping tree crowns and the ground below.
image_path = '/content/drive/MyDrive/DepthAnything/images/semi_urban.jpg'
image = Image.open(image_path)
# THE MAGIC: one line extracts depth
result = pipe(image)
depth_map = result["depth"]
# Side-by-side plot
fig, axes = plt.subplots(1, 2, figsize=(16, 8))
axes[0].imshow(image)
axes[0].set_title("Original RGB Image", fontsize=14)
axes[0].axis("off")
# Brighter = closer/higher, darker = further/lower
axes[1].imshow(depth_map, cmap='inferno')
axes[1].set_title("Predicted Depth Map (Depth Anything V2)", fontsize=14)
axes[1].axis("off")
plt.tight_layout()
plt.show()You can also loop over an entire folder of images and process them in batch:
import os, glob
folder_path = '/content/drive/MyDrive/DepthAnything/images'
image_files = glob.glob(f"{folder_path}/*.[jp][pn]*")
for img_path in image_files:
file_name = os.path.basename(img_path)
image = Image.open(img_path)
result = pipe(image)
depth_map = result["depth"]
fig, axes = plt.subplots(1, 2, figsize=(15, 6))
axes[0].imshow(image)
axes[0].set_title(f"Original RGB: {file_name}", fontsize=12)
axes[0].axis("off")
axes[1].imshow(depth_map, cmap='inferno')
axes[1].set_title("Predicted Depth Map", fontsize=12)
axes[1].axis("off")
plt.tight_layout()
plt.show()Application in Forestry
Drone surveys of forests produce hundreds of georeferenced .tif image tiles. We can run Depth Anything V2 on each tile to produce a relative depth map, then stitch those maps into a single unified spatial mosaic.
Access the sample data via the Technical Session Folder.
import rasterio
from rasterio.plot import show
tile1_path = "/content/drive/MyDrive/Data Preview/tiles/2024_08_386.tif"
tile2_path = "/content/drive/MyDrive/Data Preview/tiles/2024_08_385.tif"
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(14, 7))
with rasterio.open(tile1_path) as src1, rasterio.open(tile2_path) as src2:
show(src1, ax=ax1, title="Sample Tile One")
show(src2, ax=ax2, title="Sample Tile Two")
plt.show()Geospatial Mosaicing
Because drone surveys are made of hundreds of overlapping tiles, we need to stitch our predicted depth maps together to see the entire surveyed area.
Since we combine the AI output with rasterio, the depth maps automatically inherit the geographic metadata (CRS and spatial transforms) of the original .tif tiles.
import numpy as np
from rasterio.merge import merge
tile_paths = [tile1_path, tile2_path]
temp_depth_files = []
for i, path in enumerate(tile_paths):
with rasterio.open(path) as src:
meta = src.meta.copy()
img_array = src.read([1, 2, 3])
img_array = np.transpose(img_array, (1, 2, 0))
pil_image = Image.fromarray(img_array)
result = pipe(pil_image)
relative_depth = np.array(result["depth"], dtype=np.float32)
meta.update(count=1, dtype='float32')
out_path = f"temp_depth_tile_{i}.tif"
with rasterio.open(out_path, 'w', **meta) as dest:
dest.write(relative_depth, 1)
temp_depth_files.append(out_path)
# Merge tiles into a single mosaic
src_files_to_mosaic = [rasterio.open(fp) for fp in temp_depth_files]
mosaic, out_trans = merge(src_files_to_mosaic)
for src in src_files_to_mosaic:
src.close()
im = plt.imshow(mosaic[0], cmap='inferno')
plt.colorbar(im, label="Relative Depth / Structure Intensity (0-255)", shrink=0.5)
plt.title("Merged Relative Depth Mosaic", fontsize=16)
plt.axis("off")
plt.show()
for fp in temp_depth_files:
os.remove(fp)Ground Truthing: Calibrating AI to Reality
The depth map above is relative — pixel values range from 0 to 255, not real-world metres. To extract true scientific value (like estimating above-ground biomass) we need absolute metric heights.
We do this by:
- Extracting the AI’s predicted 0–255 value at the exact GPS coordinate of every field-measured tree.
- Comparing the AI’s guess to the true field measurement.
- Using Linear Regression to derive a formula that converts any AI pixel into true metres.
import geopandas as gpd
from rasterio.transform import rowcol
from scipy.stats import linregress
shp_path = "/content/drive/MyDrive/DepthAnything/Technicalssession/Shapefile/Groundtruthfielddata.shp"
trees_gdf = gpd.read_file(shp_path)
# Align CRS with our mosaic
with rasterio.open(tile_paths[0]) as src_crs_check:
mosaic_crs = src_crs_check.crs
if trees_gdf.crs != mosaic_crs:
trees_gdf = trees_gdf.to_crs(mosaic_crs)
# Convert GPS coords to pixel rows/columns
xs = trees_gdf.geometry.x.values
ys = trees_gdf.geometry.y.values
rows, cols = rowcol(out_trans, xs, ys)
# Sample AI values at each tree location
ai_values = []
for r, c in zip(rows, cols):
if 0 <= r < mosaic.shape[1] and 0 <= c < mosaic.shape[2]:
ai_values.append(mosaic[0, r, c])
else:
ai_values.append(float('nan'))
trees_gdf['ai_relative'] = ai_values
trees_gdf['height_m'] = trees_gdf['TH__cm_'] / 100
clean_df = trees_gdf.dropna(subset=['ai_relative', 'height_m'])
slope, intercept, r_value, p_value, std_err = linregress(clean_df['ai_relative'], clean_df['height_m'])
print(f"Formula: True Height(m) = ({slope:.6f} * AI_Value) + {intercept:.4f}")
print(f"R\u00b2 Accuracy: {r_value**2:.4f}")Mapping True Metric Height
Now that we have our calibration formula, we apply it to the entire surveyed area.
By running every pixel through (Slope × Pixel_Value) + Intercept, we convert the abstract AI representation into a true Canopy Height Model (CHM).
The colours you see represent actual metres above the ground.
# Apply regression formula to the entire mosaic
metric_height_map = (mosaic[0] * slope) + intercept
# Clip negative values to 0 (trees can't have negative height)
metric_height_map = np.clip(metric_height_map, a_min=0, a_max=None)
# Compute geographic extent from the spatial transform
map_height, map_width = metric_height_map.shape
left = out_trans.c
top = out_trans.f
right = left + (out_trans.a * map_width)
bottom = top + (out_trans.e * map_height)
geographic_extent = [left, right, bottom, top]
fig, ax = plt.subplots(figsize=(14, 10))
im = ax.imshow(metric_height_map, cmap='viridis', extent=geographic_extent)
cbar = plt.colorbar(im, ax=ax, shrink=0.5)
cbar.set_label("True Canopy Height (Meters)", fontsize=14, fontweight='bold')
# Overlay GPS field measurement points
trees_gdf.plot(ax=ax, facecolor='red', edgecolor='white', markersize=60, marker='.', label='GPS Field Measurements')
plt.title("Final Calibrated Canopy Height Model (CHM)", fontsize=18, fontweight='bold')
plt.xlabel("Longitude / Easting", fontsize=12)
plt.ylabel("Latitude / Northing", fontsize=12)
plt.legend(loc='upper right', fontsize=12)
plt.tight_layout()
plt.show()